{{VeryImportantMessage|O Robot Workbench não está em manutenção. Se você tem experiência com o tópico e está interessado em mantê-lo, por favor, declare sua intenção na seção de desenvolvedores no forum FreeCAD.
A razão pela qual esta bancada de trabalho ainda está no código-fonte mestre é porque esta bancada de trabalho está programada em C++. Se esta bancada de trabalho pudesse ser programada em Python, então ela poderia ser feita em uma bancada de trabalho externa e poderia ser movida para um repositório separado.

Introduction
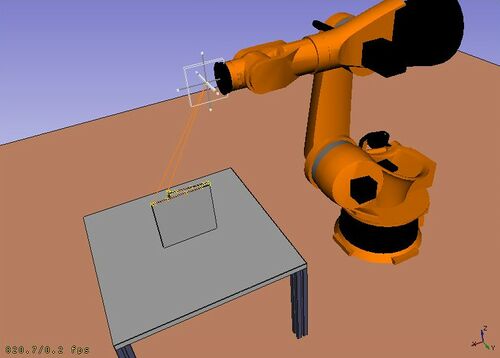
The ![]() Robot Workbench is a tool to simulate a standard 6-axis industrial robot, like Kuka.
Robot Workbench is a tool to simulate a standard 6-axis industrial robot, like Kuka.
Você pode fazer as seguintes tarefas:
- Configure um ambiente de simulação com um robô e peças de trabalho;
- Crie e preencha trajetórias de movimentos;
- Decomponha os recursos de uma peça CAD em uma trajetória.
- Simule o movimento de robô e alcance a distância;
- Exporte a trajetória para um arquivo de programa de robô;
To get started try the Robot tutorial, and see the programming interface in the RobotExample.py example file.
Tools
Robot toolbar
 Place Robot: Places a robot in the model.
Place Robot: Places a robot in the model.
 Trajectory: Creates an empty trajectory.
Trajectory: Creates an empty trajectory.
 Insert in Trajectory: Inserts a robot tool position into a trajectory.
Insert in Trajectory: Inserts a robot tool position into a trajectory.
 Insert in Trajectory (vertex): Inserts a preselected position into a trajectory.
Insert in Trajectory (vertex): Inserts a preselected position into a trajectory.
 Edge to Trajectory: Generates a trajectory from selected edges.
Edge to Trajectory: Generates a trajectory from selected edges.
 Dress-Up Trajectory: Creates a dress-up object that overrides aspects of a trajectory.
Dress-Up Trajectory: Creates a dress-up object that overrides aspects of a trajectory.
 Trajectory Compound: Groups and connects multiple trajectories into one.
Trajectory Compound: Groups and connects multiple trajectories into one.
 Set Home Position: Sets the home position of a robot.
Set Home Position: Sets the home position of a robot.
 Move to Home: Moves a robot to its home position.
Move to Home: Moves a robot to its home position.
 Simulate Trajectory: Simulates robot movement along a selected trajectory.
Simulate Trajectory: Simulates robot movement along a selected trajectory.
Other tools
- Insert Robot:
 Tool: Adds a tool shape to a robot.
Tool: Adds a tool shape to a robot.
- Set Default Orientation: Sets the default orientation for subsequent waypoint creation.
- Set Default Values: Sets the default values for speed, acceleration, and continuity for subsequent waypoint creation.
- Export Trajectory:
 Kuka Compact Subroutine: Exports a trajectory as a compact KRL subroutine.
Kuka Compact Subroutine: Exports a trajectory as a compact KRL subroutine.
 Kuka Full Subroutine: Exports a trajectory as a full KRL subroutine.
Kuka Full Subroutine: Exports a trajectory as a full KRL subroutine.
Programação (Scripting)
Veja o exemplo Robot API para obter uma descrição das funções utilizadas para modelar os deslocamentos de robô.
Tutorials
Esta página foi obtida de https://wiki.freecad.org/Robot_Workbench