| Тема |
|---|
| Верстак Робот |
| Уровень |
| Средний |
| Время для завершения |
| Авторы |
| FreeCAD версия |
| Примеры файлов |
| Смотрите также |
| None |
Обзор
В этом руководстве рассказывается, как использовать FreeCAD и ![]() Верстак Симуляции Робота для моделирования движений 6-осевого серийного робота. Руководство посвящено созданию VRML-файла, используемого в качестве визуализации. Основой VRML-файла является модель FreeCAD. Используемая версия FreeCAD - 0.11.4252ppa1 на Ubuntu 32bit.
Верстак Симуляции Робота для моделирования движений 6-осевого серийного робота. Руководство посвящено созданию VRML-файла, используемого в качестве визуализации. Основой VRML-файла является модель FreeCAD. Используемая версия FreeCAD - 0.11.4252ppa1 на Ubuntu 32bit.
Открытиеытие файла или создание файла с помощью FreeCAD
Руководство основано на STEP-файле робора Stäubli TX40 (TX40-HB.stp). Вы можете скачать этот файл с сайта Stäubli. Однако, хотя у меня не было времени проверить это, метод должен быть применим и к модели, полностью сделанной в FreeCAD. После открытия файла ты должен получить следующее:
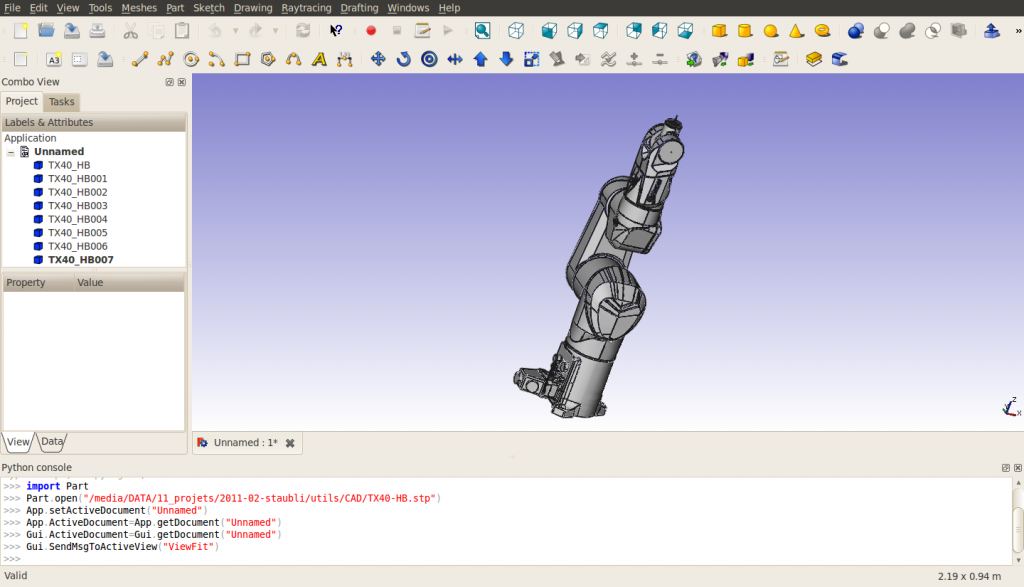
Обрати внимание, что при импорте робот состоит из 8 фигур, расположенных непосредственно в корне дерева документа. Структура экспортируемого VRML-файла может измениться, если используются группы. Элементы расположены в порядке от основания к инструменту. Последний элемент содержит оси вращения всех осей робота. Имя корреляции фигуры - задаётся именем детали (на данный момент (март 2011) FreeCAD не импортирует имена, включённые в STEP-файлы):
| FreeCAD имя | STEP имя английский | STEP имя русский |
|---|---|---|
| TX40_HB | HORIZONTAL BASE CABLE OUTLET | ГОРИЗОНТАЛЬНОЕ ОСНОВАНИЕ КАБЕЛЬНЫЙ ВЫВОД |
| TX40_HB001 | SHOULDER | ПЛЕЧО |
| TX40_HB002 | ARM | РУКА |
| TX40_HB003 | ELBOW | ЛОКОТЬ |
| TX40_HB004 | FOREARM | ПРЕДПЛЕЧЬЕ |
| TX40_HB005 | WRIST | ЗАПЯСТЬЕ |
| TX40_HB006 | TOOL FLANGE | ФЛАНЕЦ ИНСТРУМЕНТА |
| TX40_HB007 | ? | ? |
Для этого импорта измени "Стиль представления" каждой фигуры, за исключением TX40_HB007, с "Плоские линии" на "Только грани", чтобы экспорт VRML выглядел хорошо. Я также изменил цвета на [245, 196, 0] и [204, 204, 204], чтобы они лучше соответствовали жёлтому цвету Stäubli. Скройте TX40_HB007, потому что он содержит оси всех сочленений и не может быть отсоединён.
Определение геометрических характеристик
Для того чтобы построить таблицу Денавита-Хартенберга (смотри Робот 6-Осевой) и подготовить vrml-файл, необходимо получить характеристики робота. На данный момент инструмент измерения в FreeCAD не готов, вы можете использовать оси, входящие в TX40_HB007 (координаты указываются слева внизу при наведении на объект мышью) или использовать консоль Python для получения некоторой информации о геометрии. Обратите внимание, что DH-таблица нужна только в том случае, если вам нужно использовать обратную кинематику, то есть получить декартовы координаты или управлять роботом с помощью декартовых координат. DH-таблица для этого робота выглядит следующим образом (мм, град и град/с):
| i | d | θ | r | α | θмин | θмакс | Скорость вращения оси |
|---|---|---|---|---|---|---|---|
| 1 | 320 | q1 | 0 | -90 | -180 | 180 | 555 |
| 2 | 35 | q2 - 90 | 225 | 0 | -125 | 125 | 475 |
| 3 | 0 | q3 + 90 | 0 | 90 | -138 | 138 | 585 |
| 4 | 225 | q4 | 0 | -90 | -270 | 270 | 1035 |
| 5 | 0 | q5 | 0 | 90 | -120 | 133.5 | 1135 |
| 6 | 65 | q6 | 0 | 0 | -270 | 270 | 1575 |
Затем создаётся csv файл:
a , alpha, d , theta, rotDir, maxAngle, minAngle, AxisVelocity 0 , -90, 320, 0, 1, 180, -180, 555 225, 0, 35, -90, 1, 125, -125, 475 0 , 90, 0, 90, 1, 138, -138, 585 0 , -90, 225, 0, 1, 270, -270, 1035 0 , 90, 0, 0, 1, 133.5, -120, 1135 0 , 0, 65, 0, 1, 270, -270, 1575
Экспорт в VRML
Экспортируй документ в VRML-файл. Структура VRML-файла выглядит следующим образом:
#VRML V2.0 utf8
Group {
children
Group {
children [
Group {
…
},
Group {
…
},
Group {
…
},
Group {
…
},
Group {
…
},
Group {
…
},
Group {
…
},
Group {
…
} ]
}
}
Вы можете заметить, что у нас есть 8 независимых групп, соответствующих 8 элементам.
Подготовка vrml-файла
Все элементы в VRML-файле выражены в базовом кадре, независимо друг от друга. Для Верстака Симуляции Робота нам нужно создать структуру, в которой движение одного элемента вызывает движение всех последующих элементов структуры. Расположение элементов будет относительным по отношению к предыдущему элементу, поэтому нам необходимо включить некоторые преобразования из абсолютной системы отсчета в относительную. Эти переводы описаны на следующем рисунке:
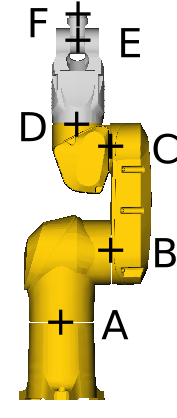
Здесь
- A=(0, 0, 168)
- B=(0, 107.8, 320)
- C=(0, 104.15, 545)
- D=(0, 35, 601)
- E=(0, 35, 770)
- F=(0, 35, 835).
Рассмотрим пример оси 4 между ELBOW - ЛОКТЕМ и FOREARM - ПРЕДПЛЕЧЬЕМ, расположенной в точке D=(xd, yd, zd). Привязкой для оси FreeCAD является
"DEF FREECAD_AXIS4 Transform { rotation 0 1 0 0 children ["
Это соответствует вращению вокруг оси y. В CAD-модели вращение происходит вокруг оси z. Таким образом, нам нужен поворот вокруг оси x на перед определением оси FreeCAD и на после него. Также перемещение (-xd, -yd, -zd) необходимо непосредственно перед группой, соответствующей определению FOREARM - ПРЕДПЛЕЧЬЯ, чтобы выразить его в относительной системе отсчета с центром в точке D. Это означает, что перемещение (xd, yd, zd) должно быть вставлено перед первым вращением.
В итоге VRML-файл от определения ELBOW - ЛОКТЯ до определения FOREARM - ПРЕДПЛЕЧЬЯ выглядит следующим образом:
# ELBOW
Group {
… here comes the unmodified definition of ELBOW
},
Transform {
translation 0 35 601
rotation 1 0 0 1.5707963
children
DEF FREECAD_AXIS4 Transform { rotation 0 1 0 0 children
Transform {
rotation 1 0 0 -1.5707963
children
Transform {
translation 0 -35 -601
children [
# FOREARM
Group {
... here comes the unmodified definition of FOREARM
},
В конце документа необходимо вставить соответствующие закрывающие скобки: ]}}}},
для каждой из 6 осей. В итоге документ выглядит так (не знаю, можно ли давать здесь ссылку на файл из-за авторских прав):
#VRML V2.0 utf8
Group {
children
Group {
children [
# HORIZONTAL BASE CABLE OUTLET
Group {
... here comes the unmodified definition of HORIZONTAL BASE CABLE OUTLET
},
Transform {
translation 0 0 168
rotation 1 0 0 1.5707963
children
DEF FREECAD_AXIS1 Transform { rotation 0 1 0 0 children
Transform {
rotation 1 0 0 -1.5707963
children
Transform {
translation 0 0 -168
children [
# SHOULDER
Group {
... here comes the unmodified definition of SHOULDER
},
Transform {
translation 0 107.8 320
#rotation 0 0 1 0
children
DEF FREECAD_AXIS2 Transform { rotation 0 1 0 0 children
Transform {
#rotation 0 0 1 0
children
Transform {
translation 0 -107.8 -320
children [
# ARM
Group {
... here comes the unmodified definition of ARM
},
Transform {
translation 0 104.15 545
#rotation 0 0 1 0
children
DEF FREECAD_AXIS3 Transform { rotation 0 1 0 0 children
Transform {
#rotation 0 0 1 0
children
Transform {
translation 0 -104.15 -545
children [
# ELBOW
Group {
... here comes the unmodified definition of ELBOW
},
Transform {
translation 0 35 601
rotation 1 0 0 1.5707963
children
DEF FREECAD_AXIS4 Transform { rotation 0 1 0 0 children
Transform {
rotation 1 0 0 -1.5707963
children
Transform {
translation 0 -35 -601
children [
# FOREARM
Group {
... here comes the unmodified definition of FOREARM
},
Transform {
translation 0 35 770
#rotation 0 0 1 0
children
DEF FREECAD_AXIS5 Transform { rotation 0 1 0 0 children
Transform {
#rotation 0 0 1 0
children
Transform {
translation 0 -35 -770
children [
# WRIST
Group {
... here comes the unmodified definition of WRIST
},
Transform {
translation 0 35 835
rotation 1 0 0 1.5707963
children
DEF FREECAD_AXIS6 Transform { rotation 0 1 0 0 children
Transform {
rotation 1 0 0 -1.5707963
children
Transform {
translation 0 -35 -835
children [
# TOOL FLANGE
Group {
... here comes the unmodified definition of TOOL FRAME
},
Group {
... here comes the unmodified definition of TX40_HB007
} # "]" was deleted from this line
]}}}},
]}}}},
]}}}},
]}}}},
]}}}},
]}}}},
] # this is the "]" deleted from the line above
}
}
Вот исправление для получения VRML-файла, подходящего для моделирования роботов:
7a8
> # HORIZONTAL BASE CABLE OUTLET
95968a95970,95981
> Transform {
> translation 0 0 168
> rotation 1 0 0 1.5707963
> children
> DEF FREECAD_AXIS1 Transform { rotation 0 1 0 0 children
> Transform {
> rotation 1 0 0 -1.5707963
> children
> Transform {
> translation 0 0 -168
> children [
> # SHOULDER
128428a128442,128453
> Transform {
> translation 0 107.8 320
> #rotation 0 0 1 0
> children
> DEF FREECAD_AXIS2 Transform { rotation 0 1 0 0 children
> Transform {
> #rotation 0 0 1 0
> children
> Transform {
> translation 0 -107.8 -320
> children [
> # ARM
206503a206529,206540
> Transform {
> translation 0 104.15 545
> #rotation 0 0 1 0
> children
> DEF FREECAD_AXIS3 Transform { rotation 0 1 0 0 children
> Transform {
> #rotation 0 0 1 0
> children
> Transform {
> translation 0 -104.15 -545
> children [
> # ELBOW
267111a267149,267160
> Transform {
> translation 0 35 601
> rotation 1 0 0 1.5707963
> children
> DEF FREECAD_AXIS4 Transform { rotation 0 1 0 0 children
> Transform {
> rotation 1 0 0 -1.5707963
> children
> Transform {
> translation 0 -35 -601
> children [
> # FOREARM
417854a417904,417915
> Transform {
> translation 0 35 770
> #rotation 0 0 1 0
> children
> DEF FREECAD_AXIS5 Transform { rotation 0 1 0 0 children
> Transform {
> #rotation 0 0 1 0
> children
> Transform {
> translation 0 -35 -770
> children [
> # WRIST
422053a422115,422126
> Transform {
> translation 0 35 835
> rotation 1 0 0 1.5707963
> children
> DEF FREECAD_AXIS6 Transform { rotation 0 1 0 0 children
> Transform {
> rotation 1 0 0 -1.5707963
> children
> Transform {
> translation 0 -35 -835
> children [
> # TOOL FLANGE
435627c435700,435707
< } ]
---
> }
> ]}}}},
> ]}}}},
> ]}}}},
> ]}}}},
> ]}}}},
> ]}}}},
> ]
Эта страница получена от https://wiki.freecad.org/VRML_Preparation_for_Robot_Simulation