| Tema |
|---|
| Ambiente de trabajo Robot |
| Nivel |
| Intermedio |
| Tiempo para completar |
| Desconocido |
| Autores |
| Versión de FreeCAD |
| Archivos de ejemplos |
| Ver también |
| None |
Vista general
Este artículo trata de llevar un robot industrial estándar de 6 ejes a FreeCAD para su simulación en el ![]() Ambiente de trabajo Robot
Ambiente de trabajo Robot
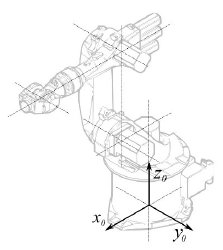
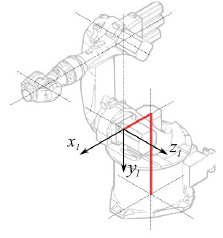
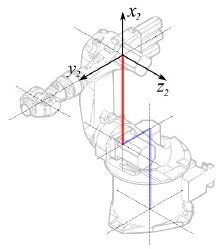
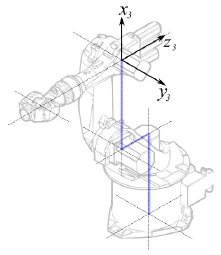
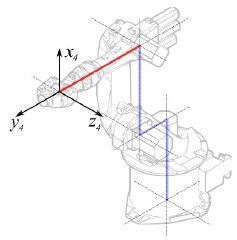
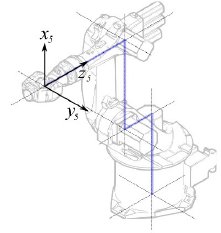
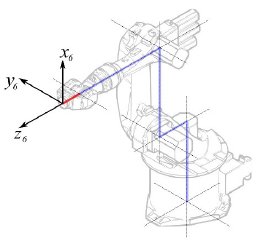
La siguiente descripción sigue el sistema de parámetros Denavit-Hartenberg, como también se describe en el libro de John J. Craigs "Introducción a la robótica".
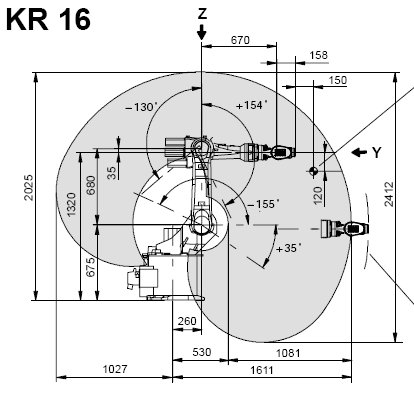
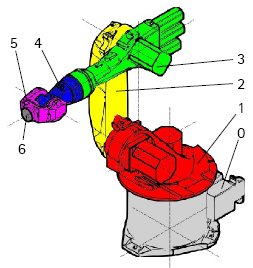
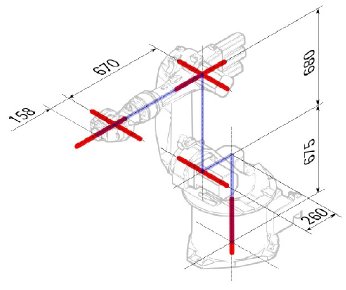
Ejemplo Kuka
|
|
|
Cinemática
| Segmento | Parámetro | Descripción |
|---|---|---|
|
Base de configuración | |
|
° |
Segmento 1 |
|
°
° |
Segmento 2 |
|
° |
Segmento 3 |
|
° |
Segmento 4 |
|
° |
Segmento 5 |
|
° |
Segmento 6 |
Esto conduce a la tabla siguiente:
| 1 | q1 | 675 mm | 260 mm | -90° |
| 2 | q2 - 90° | 0 mm | 680 mm | 0° |
| 3 | q3 | 0 mm | 0 mm | 90° |
| 4 | q4 | -670 mm | 0 mm | -90° |
| 5 | q5 | 0 mm | 0 mm | 90° |
| 6 | q6 | -158 mm | 0 mm | 180° |
Ya que los robots Kuka no tienen todos los ejes a 0 en la posición dibujada en L, tenemos que cambiar el eje 2 y 3 por 90°.
| 1 | q1 | 675 mm | 260 mm | -90° |
| 2 | q2 | 0 mm | 680 mm | 0° |
| 3 | q3 - 90° | 0 mm | 0 mm | 90° |
| 4 | q4 | -670 mm | 0 mm | -90° |
| 5 | q5 | 0 mm | 0 mm | 90° |
| 6 | q6 | -158 mm | 0 mm | 180° |
En la hoja de datos encontramos información adicional sobre los ejes:

Lo que conduce a esta tabla completa:
| Axis Speed | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 0 | 675 | 260 | -90 | -185 | 185 | 156 |
| 2 | 0 | 0 | 680 | 0 | -155 | 35 | 156 |
| 3 | - 90 | 0 | 0 | 90 | -130 | 154 | 156 |
| 4 | 0 | -670 | 0 | -90 | -350 | 350 | 330 |
| 5 | 0 | 0 | 0 | 90 | -130 | 130 | 330 |
| 6 | 0 | -158 | 0 | 180 | -350 | 350 | 615 |
Representación visual
FreeCAD puede generar una basta representación visual de la tabla cinemática. Pero si quieres acercarte más a la realidad puedes utilizar un archivo VRML con la forma del robot para la simulación. Por ejemplo, Kuka proporciona archivos VRML de sus modelos. El archivo VRML es cargado con la especificación del robot en FreeCAD. Para permitir a FreeCAD mover los ejes tenemos que editar el archivo VRML e insertar nodos de transformación especiales que FreeCAD pueda encontrar y manipular.
Otra vez mostrado por el ejemplo Kuka KR 16. Empezando desde la línea 1:
#VRML V2.0 utf8
#
# This VRML97 file was exported using eM-Workplace
# (c) Tecnomatix Technologies GmbH & Co. KG
# Heisenberg-Bogen 1
# D-85609 Aschheim-Dornach
# GERMANY
#
#Background
#{
# skyColor [0.752941 0.752941 0.752941]
#}
Transform
{
#rotation 1 0 0 -1.5707963
#scale .001 .001 .001
children
[
DEF AOBJ_0001_000_TRAFO Transform
{
children
[
...
Verás que este archivo es exportado con un software de simulación de robots llamado Tecnomatix. Elimina ese aviso y añade la URL de donde has obtenido el archivo, porque Tecnomatix no tiene ningún copyright en el contenido del archivo. Es solo un conversor! Antes de nada eliminamos el nodo de Background. Luego eliminamos el nodo de rotación y escala para tener el modelo en mm y Z a la derecha.
Justo al final:
] }
] }
] }
]
}
#ROUTE SENS_04_OBJ.rotation_changed TO AXIS_04_OBJ.rotation
#ROUTE SENS_27_OBJ.rotation_changed TO AXIS_27_OBJ.rotation
#ROUTE SENS_32_OBJ.rotation_changed TO AXIS_32_OBJ.rotation
#ROUTE SENS_44_OBJ.rotation_changed TO AXIS_44_OBJ.rotation
#ROUTE SENS_46_OBJ.rotation_changed TO AXIS_46_OBJ.rotation
#ROUTE SENS_49_OBJ.rotation_changed TO AXIS_49_OBJ.rotation
#DEF AnySIMTimer TimeSensor
#{
# cycleInterval 1.000000
# loop TRUE
#}
Desmarcar como comentario el sensor de tiempo TimeSensor y las 6 rutas. Estas 6 líneas te dan una pista de la situación del eje real del robot! Primero busca por "AXIS_04_OBJ" que te lleva a esta parte:
...
Transform { rotation 1 0 0 1.570796 children [
DEF SENS_04_OBJ-0001 CylinderSensor
{
diskAngle 1.570796
minAngle -3.228859
maxAngle 3.228859
offset 0.000000
}
DEF FREECAD_AXIS1 Transform { rotation 0 1 0 0 children [
DEF AXIS_04_OBJ-0001 Transform
{
children
[
Transform { rotation 1 0 0 -1.570796 children [
DEF AOBJ_0001_003_TRAFO Transform
{
rotation 1.000000 0.000000 0.000000 3.141593
translation -600.000000 500.000000 300.000000
children
[
...
Tienes que insertar justo encima de la definición de este nodo la línea "DEF FREECAD_AXIS1 Transform { rotation 0 1 0 0 children [" la cual es el anclaje para que FreeCAD pueda mover el eje.
Ahora haz lo mismo para FREECAD_AXIS2,FREECAD_AXIS3,FREECAD_AXIS4,FREECAD_AXIS5 y FREECAD_AXIS6. No olvides cerrar los corchetes al final del archivo y listo!
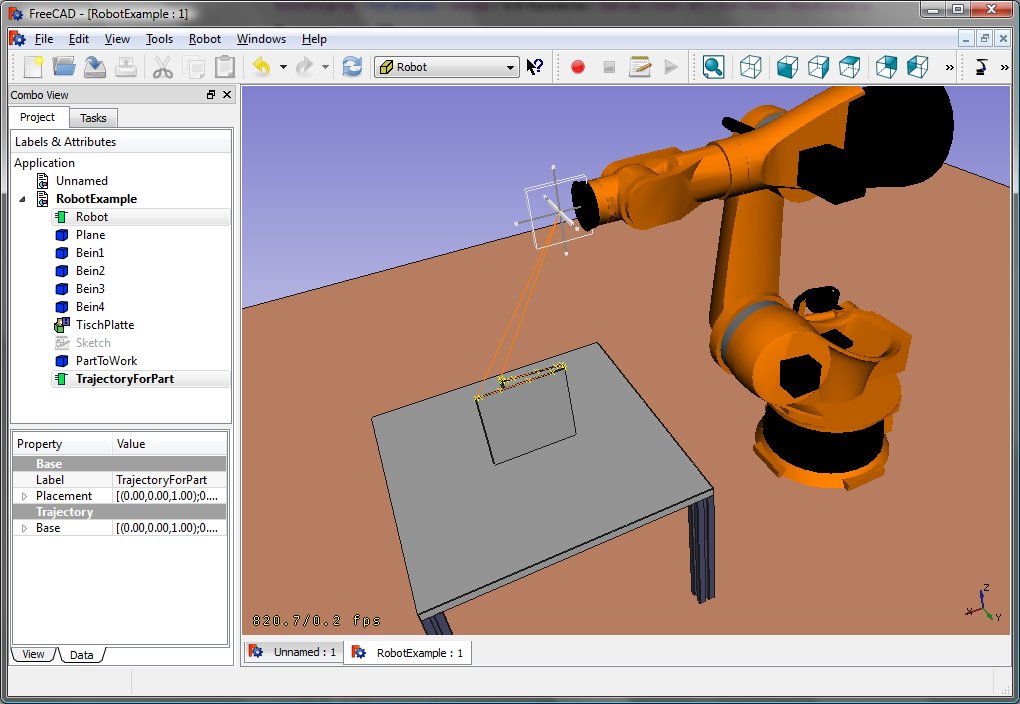
Puedes cargar el VRML para instalar el robot:
App.activeDocument().addObject("Robot::RobotObject","Robot")
App.activeDocument().Robot.RobotVrmlFile = "C:/_Projekte/FreeCAD0.9_build/mod/Robot/Lib/Kuka/kr16.wrl"
Lo cual debería dar este resultado:
KR 210
| Axis Speed | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 0 | 750 | 350 | -90 | -185 | 185 | 156 |
| 2 | 0 | 0 | 1250 | 0 | -155 | 35 | 156 |
| 3 | - 90 | 0 | 0 | 90 | -130 | 154 | 156 |
| 4 | 0 | -1100 | 0 | -90 | -350 | 350 | 330 |
| 5 | 0 | 0 | 0 | 90 | -130 | 130 | 330 |
| 6 | 0 | -230 | 0 | 180 | -350 | 350 | 615 |
KR 500
| Axis Speed | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 0 | 1045 | 500 | -90 | -185 | 185 | 156 |
| 2 | 0 | 0 | 1300 | 0 | -155 | 35 | 156 |
| 3 | - 90 | 0 | 0 | 90 | -130 | 154 | 156 |
| 4 | 0 | -1025 | 0 | -90 | -350 | 350 | 330 |
| 5 | 0 | 0 | 0 | 90 | -130 | 130 | 330 |
| 6 | 0 | -250 | 0 | 180 | -350 | 350 | 615 |
Links
- Springer Handbook of Robotics, section Kinematics, p 9-33.
- Denavit-Hartenberg Parameter 3D Video Tutorial Denavit-Hartenberg Parameter 3D Video Tutorial for a KUKA industry robot on YouTube (german).
- Denavit-Hartenberg Reference Frame Layout Denavit-Hartenberg Reference Frame Layout on YouTube.
- RoboAnalyzer RoboAnalyzer is a 3D model based software that can be used to teach and learn the Robotics concepts.
Esta página ha sido recuperada de https://wiki.freecad.org/Robot_6-Axis